
網絡RTK(real time kinematic)是近年來在常規RTK 和差分GPS 的基礎上建立起來的一種新技術,目前沿處于試驗、發展階段。常規RTK技術是一種對動態用戶進行實時相對定位的技術。進行單站RTK 工作時,參考站需將自己所獲得的載波相位觀測值(最好加上測碼偽距觀測值)及測站位置,通過數據通訊鏈實時播發給在其周圍工作的流動站用戶。于是這些動態用戶就能根據自己獲得的相同歷元的載波相位觀測值(最好加上測碼偽距觀測值和廣播星歷)進行實時相對定位,進而根據參考站的站坐標求得自己的瞬間位置。
為消除衛星鐘和接收機鐘的鐘差,削弱衛星星歷誤差、電離層延遲誤差和對流層延遲誤差數等的影響,在RTK 中通常采用雙差觀測值。其觀測方程可寫為
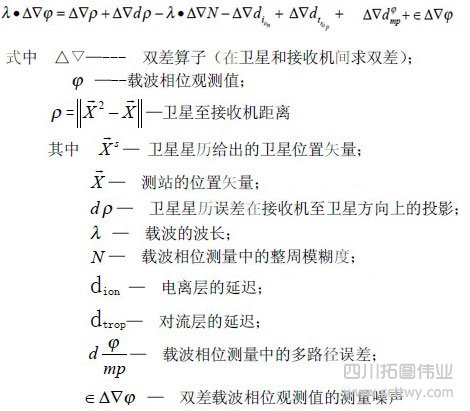
整周模糊度△▽N 可以通過初始化來確定。也可采用OTF 法直接依據一個歷元或數個歷元的觀測值來確定。利用高精度的雙頻測碼偽觀測值及(或)寬巷觀測值將有助于整周模糊
度△▽N 的確定。
常規RTK 是建立在流動站與參考站誤差強相關這一假設的基礎上。當流動站離參考站較近(例如不超過10~15km)時,上述假設一般都成立,此時利用一個或數個歷元的觀測資料就可以得到較好的厘米級精度定位結果。然而隨著流動站與參考站之間距離的增加,這種誤差相關性將變得越來越差。公式中的軌道偏差項△▽dρ、電離層延遲的殘差項DÑdtrop和對流層延遲的殘差項DÑdr 都將迅速增加,從而導致難以正確確定整周模糊度,無法得到固定解,定位精度迅速下降。當流動站和參考站之間的距離大于50km 時,常規RTK 的單歷元解一般只能達到分米級的精度。在這種情況下,為了獲得高精度的定位結果就必須采取一些特殊的方法和措施,于是網絡RTK 技術應運而生。
如果在一個較大的區域內能稀疏地、較均勻地布設多個參考站,構成一個參考站網,那么我們就能借鑒廣域差分GPS和具有多個參考站的局域差分GPS中的基本原理和方法來設法消除或削弱各種系統誤差的影響,從而獲得高精度的定位結果,這就是網RTK 的基本原理。
網絡 RTK 是由參考站網、數據處理中心和數據通訊線路組成的。參考站上應配備雙頻全波長GPS 接收機,同時該接收機最好能同時提供精度確的雙頻偽距觀測值。參考站的站坐標
應精確已知,其坐標可采用長時間GPS 靜態相對定位等方法來確定。此外,這些站還應配備數據通訊設備及氣象儀器等。參考站應按規定的采樣率進行連續觀測,并通過數據通訊鏈實時將觀測資料傳送給數據處理中心。數據處理中心再根據流動站送來的近似坐標(可根據偽距法單點定位求得)判斷出該站位于由哪三具參考站所組成的三角形式,然后根據這三個參考站的觀測資料求出流動站處所受到的系統誤差,并播發給流動用戶來進行修正以獲得精確的結果。必果時可將上述過程迭代一次。參考站與數據處理中心間的數據通訊可采用數據網DON 或無線通訊等方法進行,流動站和數據處理中心間的雙向數據通訊則可通過移動電話GSM 等方式進行。