
自香港、深圳于2000年前后建成我 國第一個GNSS參考站網(簡稱CORS)以及2006年廣東建成國內第一個覆蓋全省的CORS以來,由于其具有服務范圍廣、總投少、觀測時間短、精度高 等優點,深受全國各行各業廣泛贊譽。據估計,到2008年底,全國已建成大大小小近100個CORS,這在我國測繪史上實屬驚人成就。
在精密相對定位中,最重要的系統誤差 可概分為兩大類。第一類包括軌道誤差、電離層誤差和對流層誤差。這類誤差通過相對定位后能夠削弱。但是,剩下的殘余誤差則同點間距離的增長而擴大。第二類 誤差包括多徑誤差和天線相位中心變化。這類誤差與點間距離的長短無關。其大小完全取決于測站周圍的地形、地物和天線性能的優劣。
本文簡述這五種系統誤差的國內外研究成果,以及在與外業生產過程中可能采取的削弱措施,旨在確保GNSS成果的可靠性和精確性。
軌道誤差
衛星軌道誤差不屬于觀測誤差。但是,在數據實時處理或后處理的過程中,它既影響相位模糊值的準確確定,又影響算出的點位坐標。
1994年前,常用的軌道數據是GPS衛星播發的“廣播軌道”。它是衛星播發的“導航信息”的一部分。此導航信息是根據地面5個監測站的觀測值預先算出,并由衛星播發。1994年,IGS(國際GPS服務局)提供另一種GPS軌道,可免費下載。IGS軌道分為三種:
1、IGS精密軌道:自1994年起,7個IGS分析中心聯合出版的綜合軌道。由分析中心利用遍布全球的30—120個跟蹤站。目前IGS精密軌道是在觀測日結束后11天提供。由各單次解算值同聯合解算值之間的不符值得到的,精度高于0.1m。
2、IGS快速軌道:由多數IGS分析中心根據兩天以上的GPS軌道推算的預報軌道。預報每天開始后30分鐘的軌道。同精密軌道相比,其精度為0.1m。同廣播軌道一樣,有些衛星可能出現較大的預報誤差。
根據中歐一跟蹤站見到的衛星,與IGS精密軌道之差作出比較的誤差,同一般文獻公布值相差較大(表1)。原因有三:
表1 三種軌道的誤差 單位:m

- 一是二者采用兩種參考系。IGS采用ITRF94,廣播軌道采用WGS84;
- 二是兩種軌道采用的軌道參數不同;
- 三是表中各值是由衛星坐標算出。
當衛星在地球陰影內通過赤道時,常常出現較大的誤差,而且很難模擬。根據瑞士Bauersima[2]和Beutler[3]的研究,軌道誤差對點位坐標的影響可由下列經驗公式算出:
 式中軌道誤差dO同星站間平均距離R之比,等于基線誤差dl對基線長度l之比。由此可見,基線越長,軌道誤差越大。這也是GNSS布網原則當中邊長宜短不宜長的原因。
式中軌道誤差dO同星站間平均距離R之比,等于基線誤差dl對基線長度l之比。由此可見,基線越長,軌道誤差越大。這也是GNSS布網原則當中邊長宜短不宜長的原因。
電離層誤差
高出地球表面50—1000km 的大氣層稱為電離層。電離層是制約一般單頻機測程不超過20km的決定因素。電離層誤差具有三大特性。一是散射性,即其折射系數是電波頻率的函數。二是互 補性,即碼觀測值和載波相位觀測值的電離層改正是:數值相同,符號相反。三是瞬變性,即瞬息萬變的特性。電離層對GPS測量的影響隨時間、地點、季節和年 代而發生劇烈變化。其變化規律為:
1、天頂最小、地平最大——兩者相差50倍。這是截止高度角不能大于15°的原因之一。
2、周日變化——白天比夜間大5倍,有時大一個數量級,而且很難模擬。因此,一般情況下,晚間觀測的精度比白天好,上午觀測的成果比下午好。
3、周年變化——每年11月比4月大4倍。
4、年度變化——主要是由于太 陽黑子活動所引起。太陽黑子活動以11年為周期。每當太陽黑子爆發時,不僅影響地面的短波無線電通信,也嚴重干擾衛星信號的接收。例如:2000— 2001年是太陽黑子活動的高峰年。2000年7月20日15點,用兩臺單頻機在北京相距6km的兩測站進行觀測。正常情況下,只需20分鐘即足夠。但一 直延長到125分鐘,接收機指示燈才告知:“數據夠,可遷站。”后經查詢,正是太陽黑子爆發。
電離層誤差是由于微波散射造成的傳播時延及上層大氣(電離層和質子層)中的信號彎曲所致。
對電離層起決定作用的是電子含量 (VEC)。它受空間(取決于高程和緯度)控制,而且隨時間(取決于每天時間、每年四季和太陽黑子活動)發生劇烈變化。太陽處于最高后,電離層活動最強。 日出前電離層活動最小。最強的電離層活動位于赤道區,即緯度±30°范圍內,最小的電離活動是中緯度地區,即緯度±(30—65)°之間,以及兩極地區, 即緯度±(65—90)°。在赤道地區存在VEC最強的大空間范圍的水平梯度。這在GNSS相對定位中具有重要意義,導致相位閃爍的小空間范圍的強大電子 干擾,常出現在赤道地區。在中緯度地區只有很強的磁暴。與此相比,流動的電離層干擾呈中等規模,常出現在中緯度地區。這對觀測時間短于20分鐘的精密相對 定位很不利。相對定位時,TEC對單頻數據的影響主要是基線尺度比。當TEC為![]() 時是0.6—0.7ppm[20]。在中緯度地區太陽黑子活動較小時,最大值為1ppm。此外。還有大氣梯度造成的誤差影響。TEC是隨時間和緯度而變化。其作用為幾個ppm,而且影響三個坐標分量。在赤道地區,由于強大的電離化,將使坐標產生很大的誤差。
時是0.6—0.7ppm[20]。在中緯度地區太陽黑子活動較小時,最大值為1ppm。此外。還有大氣梯度造成的誤差影響。TEC是隨時間和緯度而變化。其作用為幾個ppm,而且影響三個坐標分量。在赤道地區,由于強大的電離化,將使坐標產生很大的誤差。
再者,電離層攝動也會產生誤差。此誤差特別影響短時間觀測值。因此,當電離層出現中等攝動時,如基線小于10km,觀測時間短于10—20分鐘,則坐標將產生幾cm的誤差。但延長觀測時間,此誤差基本削弱[25]。
據研究,截止高度角為0—15°時,電離層誤差最大。大于20°后誤差迅速減小;L2頻率的電離層誤差比L1頻率大[14]。電離層誤差對兩種觀測值的影響見表2。
表2 電離層對兩種觀測值的影響
GNSS相對定位中,為了削弱電離層誤差的影響,可酌情選用下列方法:
1、設計網時,邊長宜短不宜長,而且全網邊長大約均勻。
2、邊較長時,雙頻改正是削弱電離層誤差最簡單而有效的方法。但是,雙頻機用戶仍應注意下列三點:
- 當電離層改正對相對定位的影響很小時慎用雙頻值。
- 雙頻改正值中也隨之帶來更大的多徑誤差和觀測量噪聲。因此,在一些應用領域,只有在多徑誤差和測量噪聲都較小時,雙頻改正才是有益的。否則,應予放棄。
- 小空間范圍的電離層攝動會降低接收機的測量性能,并出現周跳,甚至更長時間的數據丟失。
3、用單頻機觀測時,在幾公里范圍內所測結果的精度,高于雙頻機測得的坐標。
4、采用電離層模型——電離層模型分為兩類:經驗模型和物理模型。前者由長期觀測數據導出。目前通用的“國際參考電離層模型”屬于經驗模型。物理模型是由物理原理演變而來,其最大優點是能夠實時觀察輸入的各種物理參數的影響及變化。缺點是太復雜,難以普遍應用。
采用電離層模型時應盡量避免使用 預報模型。因為它是由存在巨大瞬時變化的TEC取月平均值得出,很不準確。不適用于精密相位定位。寧可使用由雙頻觀測值本身導出的實際模型。為此,可使用 碼觀測值。雙頻機的碼觀測值傳播時間之差,不是同TEC成正比,而是被不同儀器的傳播時延及接收機所歪曲。此傳播時應在處理過程中一并計算,或采用檢定值 [21]。
對流層誤差
高處地球表面9—16km的大氣 層稱為對流層,其平均高度12km,在南北極區僅9km,在赤道區約16km。對流層誤差是由于微波非散射性的傳播時延及信號在下大氣層(對流層和同溫 層)中被彎曲所引起。對流層誤差分為干分量和濕分量兩部分,前者取決于氣壓和氣溫,后者則決定于水氣含量。水氣含量中干分量占總量的90%,但只占很小的 空間,而且變化小,比濕分量能更好的模擬。
在處理數據時,對流層誤差可通過標準對流層模型予以基本削弱。采用測站實測氣象數據處理時,由于地方性氣象異常,一般都得不出良好結果。
濕分量時延在對流層誤差中起決定 作用。目前,測定濕分量的最佳儀器是“水汽幅射儀(WVR),已在各衛星跟蹤站采用。由WVR導出的實際對流層折射的比較表明,在低高度角 時,Herring模型和Niell模型[13]得出的結果,比現在使用的模型(例如:Saastamoinen[19]、 Good/Goadman[9]或Black[5]好得多。
加入由標準模型得出對流及模型改 正后的殘余誤差,通過相對定位,一般可減小些。就小空間(到20km)、小高差(到100m)的測區而言,在沒有較大的氣溫梯度、濕度梯度和反常氣溫的情 況下,對流層殘差約為mm級。對于大空間、大高差和反常氣溫條件下,對流層誤差的影響將變得很大,甚至dm級,而且很復雜,詳見 [12,17,18,36,37]。
未模擬或未消除的對流層殘余誤差將影響高程分量。每1mm相對殘余誤差將使高程產生3mm的誤差[20]。
地質災害、大型建筑等的變形監測、名山或特殊工程的高程測定都需要精密測定點間高差,故應重視對流層誤差的影響。為此,根據具體情況酌情選擇下列措施:
1、精密衛星跟蹤站、CORS中心站…等宜采用WVR精密測定對流層誤差。
2、凡要求點間高差測定精度達到1cm者,選擇接收機時應檢定隨機軟件對流層模型的精度。檢定場的氣象和地形條件應類似測區。
3、宜選擇對流層最穩定的時間觀測,而且在不同季節觀測多次。
4、對流層時延同衛星高度角密切相關。宜選擇最合理的高度截止角。
多徑誤差
顧名思義,多徑誤差是由于天線接收的信號,除直接信號外,還有天線四周地形、地物的反射面經一次或多次反射來的間接信號。間接信號不僅比直接信號路程長,而且使信號的右旋極化發生變化,從而歪曲信號。受歪曲的程度取決于反射面的特性、天線接收性能和天線距地面的高度。
天線周圍的地面、斜面和重直面及粗糙度小于2°的平面,都會導致信號產生鏡反射。近年來的大量研究證明,多徑誤差具有下列特征。
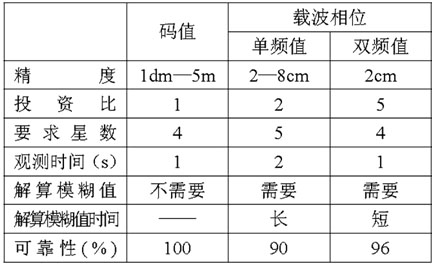
1、多徑誤差既影響信號的變幅,也影響碼和載波相位的觀測值。多徑誤差的影響:碼觀測值為(dm—m)級;載波相位觀測值為(mm—cm)級。P碼觀測值比載波相位觀測值大兩個數量級。
2、多徑誤差包括常數性和周期 性兩部分。常數性取決于天線周圍的地形地物,日復一日,重復出現。即使連續觀測多日也無法削弱。由于多徑傳播路線的變化,各站(點)的多徑誤差都呈現強大 的周期性。就總體而言,當反射面和天線之間的距離小于幾米時,其典型周期以小時計[8]。周期性誤差可通過延長觀測時間予以削弱。但是,采用動態測量、 RTK…時,顯然無法削弱多徑誤差。
3、有時,碼觀測值會發生突然變化,產生更大的誤差。與此同時,相位觀測值卻出現最小的誤差[1,23]。
4、多徑效應對載波相位得出的點位坐標的誤差,在一般的反射條件下為±(1—5)cm;在高反射條件下可達±19cm。
5、P碼觀測值的多徑誤差,在中等反射條件下為±(1—3)cm;在高反射條件下為±(4—5)cm,甚至出現相位失鎖。
6、相位觀測位中的多數周跳都是由于多徑誤差所引起。
7、在動態條件下常采用的“途中技術”(OTF)解真模糊值。此時,碼信號的多徑誤差變得特別嚴重。
8、參考站的多徑誤差,既影響各移動站的初始化時間,也影響虛擬參考站的質量。
從上述特征可見,多徑誤差是本文所述的五種系統誤差中最嚴重者,在研討技術方案、組織實施、外業觀測和數據處理的各環節中需要高度重視。否則,即使存在較大的系統誤差也會誤認為成果“合格”。
目前,可采取下列方法削弱多徑誤差:
- 選點——重視選點工作。選擇最適合衛星觀測環境的點位,是最好最省的方法。
- 高度——應盡量避開天線底 平面以上的反射物和天線平面以下的強反射物。若GNSS參考站選在樓頂時將產生極大的多徑誤差。多徑梯度的分析表明;當天線距樓頂地面不足5m時將產生極 其嚴重的多徑誤差。用幾種著名軟件的多徑指數分析表明,據多天觀測值發現,坐標精度同多徑誤差密切相關。因此,宜盡量提高CORS網內天線的高度。
- 模型——凡長期工作的GNSS站,其周圍地形地物的復雜時,宜研制適合本站的多徑誤差模型,在數據處理中加以顧及。為此,如可能,每個參考站應在不同季節進行多天(24時)觀測。
- 處理法1——靜態觀測時,延長觀測時間,再將幾個時叚的多徑誤差取平均值。顯然,采用快速靜態、RTK…等短時間觀測時無法做到。此時,應至少觀測幾分鐘。這是多徑誤差的最短周期。
- 處理法2——對含有巨大多徑誤差的碼觀測值而言,可借助多徑誤差較小的相位觀測值加以平滑,使其基本削弱。例如Hatch濾波器[10]。
- 處理法3——由碼和載波相位的觀測值之差,能算出碼觀測值的多徑誤差[4,11,23]。
- 多天線法——如有短距離的多副天線,并已知各天線之間的坐標差,則借助多天線的同步觀測數據可求出多徑誤差[15,27]。
- 扼流圈天線——自美國Spitzberg首創扼流圈天線后,使多徑誤差得到較大削弱。但是,它對天線平面上方入射信號不起作用[29]。
- 窄距相關器——接收機內的測量過程中采用一對相關器,其間距離為信號基片長度的1/10——1/20。輸入帶寬為8Mh或更大。
- MEDLL技術——MEDLL意即估算多徑時延鎖環。將相關器數目提高到10個或更大,旨在深入掌握相關函數,從而確定各條路徑信號的影響[24]。
- 其它技術——原理類似MEDLL,例如頻閃相關器……等。
今后,人衛測量總是向縮短觀測時間的方向發展,削弱多徑誤差的重要性將日益增加。緣何幾秒鐘的觀測數據難以保證1—2cm的精度,多徑效應是主要誤差源。
天線相位中心變化(PVC)
接收機天線的幾何相位中心與電子相位 中心并不嚴格重合。從而導致真正的電子相位中心是衛星信號入射方向的函數。在精密測量的天線中,兩個中心之間的距離從mm到cm級。因此,在要求1cm精 度的定位測量中必須加以顧及。此外,L1和L2的相位中心也是彼此分開的。再者,坐標解算時要使用顧及電離層誤差的線性組合值L0來計算,從而使此項誤差 增大好幾倍。
天線相位中心不僅隨入射信號的方向和 高度發生變化,而且使用天線整流罩也會引起相位中心發生變化[6,16]。為削弱PCV對定位誤差的影響,作業中規定天線必須整平和指向北方。但此法對長 基線不起作用。因為兩地接收衛星信號的高度角和方位角完全不同。這時,天線的相對檢定值就不夠用了,需要絕對檢定值[22]。
天線PCV檢定分相對(室外)檢定和 絕對(室內)檢定兩種。應采用何種方法,主要根據精度要求和投資大小而定。原則上,相對檢定時,兩天線之間的距離小于10m,以使軌道誤差、電離層誤差、 對流層誤差的影響減到極小。測量時間應至少24小時,以便利用最大的衛星覆蓋,使所測結果達到mm級精度。多徑效應也能帶來較大誤差,即使長時間觀測取平 均值,也不能將其削弱。
絕對檢定使用微波攝影儀,可測定同高度角和方位角有關的PCV[22]。當參考站有絕對檢定值時,移動站也可得出絕對檢定值。如果天線不僅旋轉,而且傾斜,并在1恒星日后重復觀測,則由野外的同步觀測,也能達到進一步削弱多徑誤差的目的[32]。
就CORS網而言,天線的相對檢定也許已夠用。但建設CORS網時,宜提高天線檢定設備重要性的認識。因為有越來越多的各型天線同時在網內作業。此外,CORS網內常常同時有扼流圈天線或帶整流罩的扼流圈天線的移動站在網內作業。
后語
科學技術決定國家命運。在科技迅猛發展的今天,誰的科技質量高,誰就走到國際前列。反之,則……。
在我國CORS技術取得巨大成就的今 天,也要重視GNSS誤差的深層理論,特別是系統誤差。因為自古以來“任何測量值都有誤差”(高斯語)。測繪學從地面邁向空間時更應重視誤差理論。偶然誤 差經多次觀測取中數后,易于將其削弱減至極小,不足為慮。但是,系統誤差則相反,除根據本文上述方法予以削弱外,還應重視誤差源頭。根據現行規范,很難發 現系統誤差。實踐證明,即使含有較大系統誤差的成果也會認為是“合格”的[37]。因此,一方面要在建設CORS的各個環節重視系統誤差,另一方面又要在 接收機的檢驗中,既要重視硬件檢驗,更應重視軟件的檢驗;既要重視表層檢驗,也應重視深層檢驗,才能讓合格的接收機參加作業,才能確保所測成果既可靠、又 精確,才能經得起歷史考驗,為后人稱道。